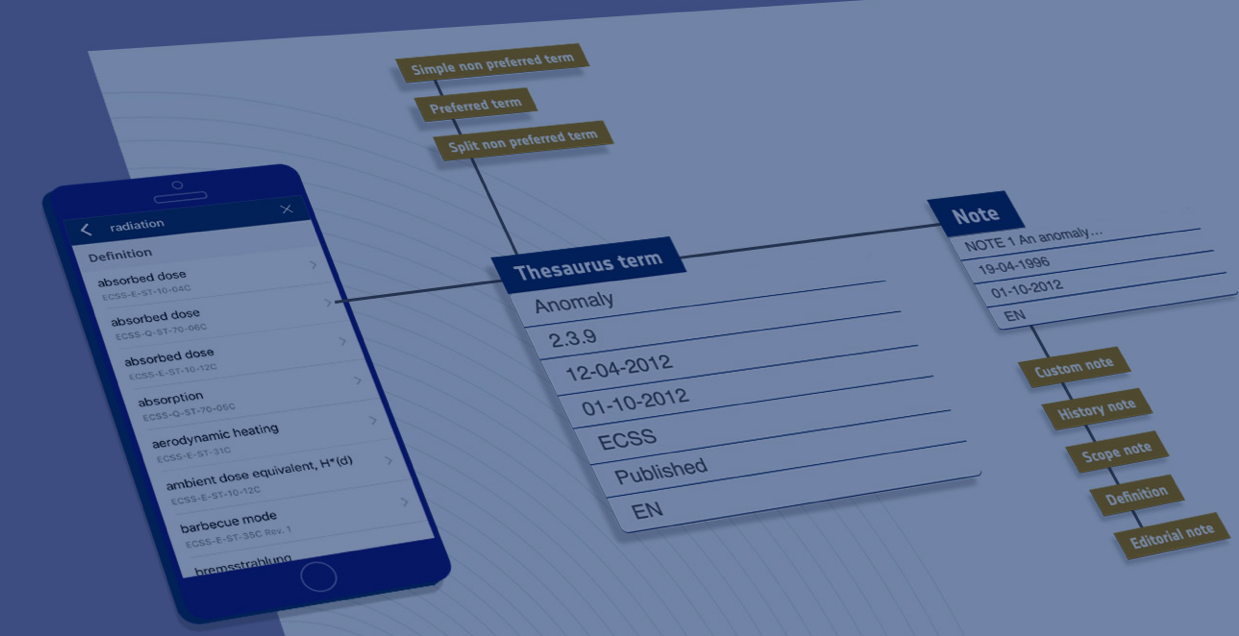
ECSS Glossary mobile applications
ECSS Glossary mobile apps available from iOS and Android store and ECSS Glossary Plugin for MS Word available from Microsoft Appstore
Search the online Glossary


ECSS Glossary mobile apps available from iOS and Android store and ECSS Glossary Plugin for MS Word available from Microsoft Appstore
Search the online Glossary

